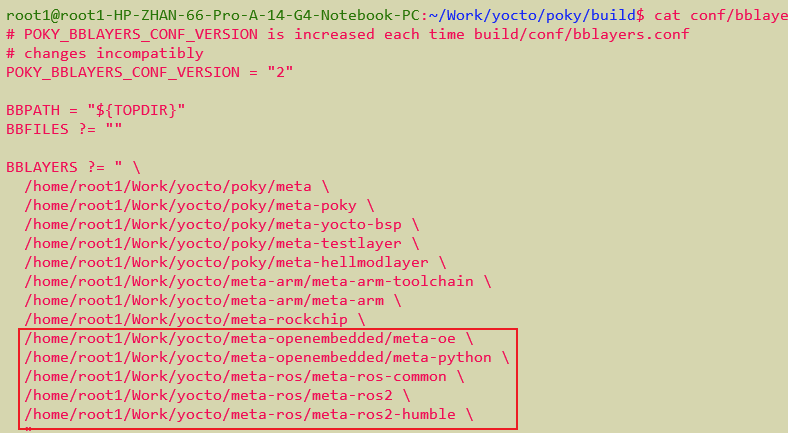
0. 最近想在A核上搭建一套ros环境,然后再配合MCU实现一些小功能 1. Yocto编译ROS2 将需要的依赖layer添加到build/conf/bblayers.conf中
meta-oe meta-python meta-ros-common meta-ros2 meta-ros2-humble
b. 添加本地配置文件 c. 进行编译 d. 编译完成,至此带有ros2的yocto镜像编译完成。 2. 自定义layer添加ros代码 a. 创建自定义layer层 1 $ bitbake-layers create-layer ../../meta-ros-publisher
b. 在layer中创建ros代码目录 使能ros环境
1 $ source /opt/ros/jazzy/setup.bash
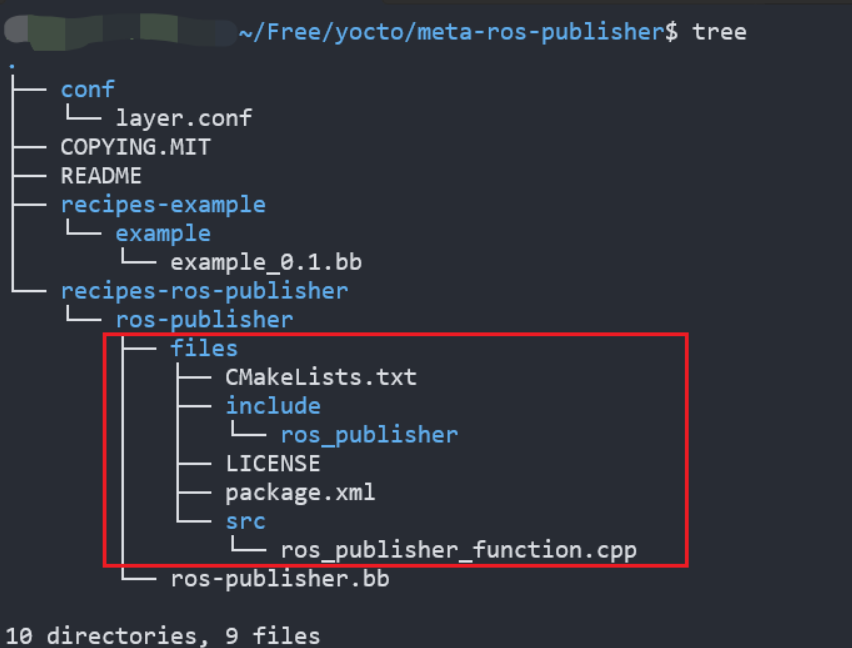
1 $ ros2 pkg create --build-type ament_cmake --license Apache-2.0 files
以下是创建的meta-ros-publisher的项目目录
1 $ vim ros_publisher_function.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 #include <chrono> #include <memory> #include <string> #include "rclcpp/rclcpp.hpp" #include "std_msgs/msg/string.hpp" using namespace std ::chrono_literals; class MinimalPublisher :{ public: MinimalPublisher() : Node("minimal_publisher" ), count_(0 ) { publisher_ = this->create_publisher<std_msgs::msg::String>("topic" , 10 ); auto timer_callback = [this]() -> void { auto message = std_msgs::msg::String(); message.data = "Hello, world!" + std ::to_string(this->count_++); RCLCPP_INFO(this->get_logger(), "Publishing: '%s'" , message.data.c_str()); this->publisher_->publish(message); }; timer_ = this->create_wall_timer(500 ms, timer_callback); } private: rclcpp::TimerBase::SharedPtr timer_; rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_; size_t count_; }; int main (int argc, char **argv) { rclcpp::init(argc, argv); rclcpp::spin(std ::make_shared<MinimalPublisher>()); rclcpp::shutdown(); return 0 ; }
d. 编写bb文件
在 Yocto 项目中,meta-xxx/recipes-xxx/*.bb 文件(.bb 文件)就是 BitBake recipe,也就是构建某个软件包「食谱」,它的作用包括:
描述包信息:如包名、版本、摘要、许可证等。
定义构建源码获取方式:通过 SRC_URI 指定源码或二进制的位置。
声明依赖关系:告诉 BitBake 构建这个包需要哪些其他包(DEPENDS、RDEPENDS)。
指定构建流程:通过变量或默认任务(do_fetch、do_unpack、do_configure、do_compile、do_install 等)告诉系统如何编译、安装和打包这个软件。
简单来说,每个 .bb 文件定义了你想在目标镜像或包中包含的一个组件,告诉 Yocto 如何抓源、打补丁、编译、安装、生成最终镜像。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 SUMMARY = "Example ROS2 Publisher Node" LICENSE = "GPL-2.0-only" LIC_FILES_CHKSUM = "file://package.xml;beginline=8;endline=8;md5=82f0323c08605e5b6f343b05213cf7cc" ROS_BUILD_TYPE = "ament_cmake" inherit ros_${ROS_BUILD_TYPE} inherit ros_distro_jazzy ROS_BUILD_DEPENDS = " \ rclcpp \ std-msgs \ " ROS_BUILDTOOL_DEPENDS = " \ ament-cmake-native \ ament-package-native \ ament-cmake-core-native \ cmake-native \ python3-catkin-pkg-native \ " ROS_EXPORT_DEPENDS = " \ rclcpp \ std-msgs \ " ROS_BUILDTOOL_EXPORT_DEPENDS = " \ ament-cmake-native \ ament-package-native \ ament-cmake-core-native \ cmake-native \ python3-catkin-pkg-native \ " ROS_EXEC_DEPENDS = "" SRC_URI = "file://CMakeLists.txt \ file://package.xml \ file://src/ \ file://include/ \ " DEPENDS = "${ROS_BUILD_DEPENDS} ${ROS_BUILDTOOL_DEPENDS}" # Bitbake doesn't support the "export" concept, so build them as if we needed them to build this package (even though we actually # don' t) so that they're guaranteed to have been staged should this package appear in another' s DEPENDS.DEPENDS += "${ROS_EXPORT_DEPENDS} ${ROS_BUILDTOOL_EXPORT_DEPENDS}" RDEPENDS:${PN} += "${ROS_EXEC_DEPENDS}" S = "${WORKDIR}" UNPACKDIR = "${S}"
1 $ bitbake-layers add-layer ../../meta-ros-publisher
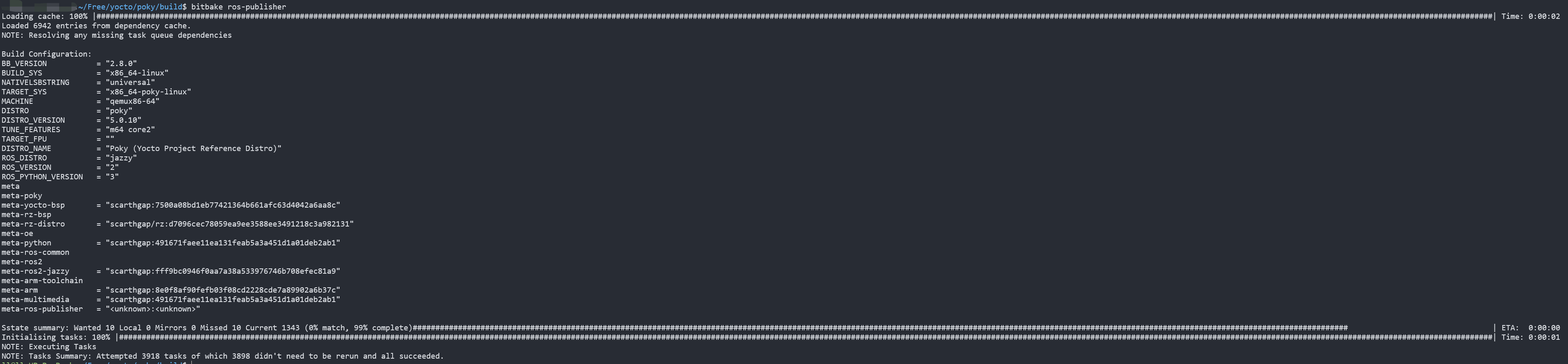
f. 将ros-publisher添加到本地配置文件 g. 编译ros-publisher h. 编译yocto镜像 1 $ bitbake core-image-base
i. 问题 在编译时遇到了两个问题,一个是报错找不到ament_cmake,另一个是编译的python环境No module name ‘ament_package’.